/webcode.jsp
/de/suche/index.jsp
https://publikationen.dguv.de/DguvWebcode?query=
Wie lässt sich nun die Bindung eines mobilen Steuergeräts an einen definierten örtlichen Bereich oder einen festen Standort als Voraussetzung für die Bedienfreigabe konkret technisch umsetzen? Nachfolgend sind beispielhafte Konzepte aufgeführt, mit denen sich eine solche Ortsbindung realisieren lässt.
Die Bedienperson meldet sich an einer festgelegten Stelle an der Maschine oder Anlage an und erhält anschließend für einen festgelegten Zeitraum die Freigabe zur Bedienung der Maschine. Nach Ablauf dieser Zeit stoppt die Maschine automatisch. Soll die Bedienung fortgesetzt werden, ist eine erneute Anmeldung erforderlich.
Die Anmeldung kann sowohl über technische Maßnahmen (Sensoren) als auch über ein festgelegtes Anmeldeverfahren (Handshake) erfolgen. Dieses kann zum Beispiel so aussehen, dass auf dem Display des mobilen Bediengeräts ein Code angezeigt wird, der dann zur Bestätigung an der Maschine eingegeben werden muss - oder umgekehrt. Auch das Scannen eines an der Maschine oder dem Bediengerät angebrachten QR-Codes ist als Anmeldeverfahren möglich. In jedem Fall muss sichergestellt sein, dass eine Anmeldung nur möglich ist, wenn sich Bedienperson bzw. Bediengerät bei der Anmeldung am vorgesehenen Ort befindet.
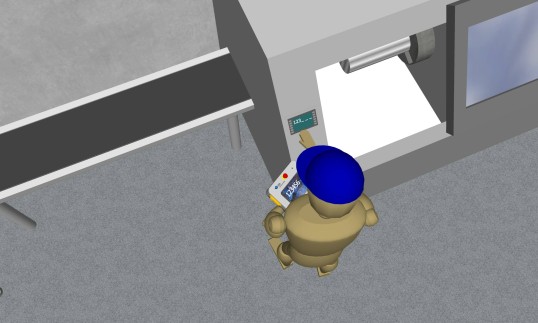
Bedienperson meldet sich an der Maschine an
Bild: IFA

Innerhalb der Freigabedauer kann die Maschine bedient werden
Bild: IFA
Bei der Festlegung der Freigabedauer ist zu berücksichtigen, dass sich die Bedienperson während der freigegebenen Zeit vom vorgegeben Bedienbereich entfernen kann. Daher darf diese Dauer nicht zu lange gewählt werden.
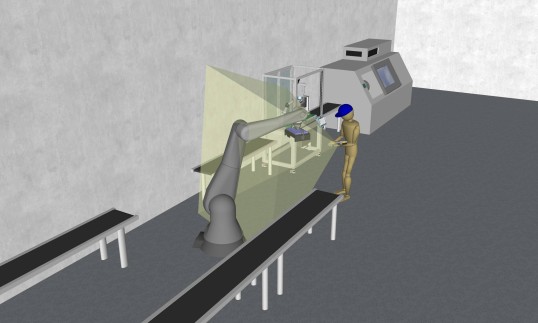
Erfolgt die Datenübertragung des Bediengeräts an den Empfänger über eine optische Verbindung (ähnlich einer TV-Fernbedienung), muss das Bediengerät während der Bedienung immer zur Empfangseinrichtung ausgerichtet sein. Somit ist eine Maschinenbedienung nur möglich, wenn eine Sichtverbindung zwischen Bediengerät und Maschine/Anlage besteht. Wird das Gerät weggeschwenkt, stoppt die Maschine sofort.
Bei Datenverbindungen über Funk lässt sich das Bediengerät auch mit einer Laserdiode ausstatten, deren Lichtstrahl auf ein Empfangsmodul an der Maschine gerichtet werden muss. Nur wenn der Lichtstrahl auf den Empfänger trifft, wird die Bedienung der Maschine freigegeben. Hier ist jedoch zu beachten, dass eine Spiegelung des Sonnenlichts oder ein fest angebrachtes LED-Modul die Funktionalität manipulieren kann.
Daher ist es wichtig, dass für das Freigabesignal ein codierter Lichtstrahl verwendet wird.
Da bei dieser Art der Ortsbindung eher die Richtung, weniger eine Entfernung für die Bedienung eingeschränkt wird, ist es wichtig, bei der Positionierung des Empfangsmoduls darauf zu achten, dass die optische Verbindung des Bediengerätes mit der Sichtachse der Bedienperson vergleichbar ist. Der Empfänger ist also so zu auszurichten, dass das Bediengerät aus der vorher festgelegten Richtung zur Maschine gehalten werden muss.
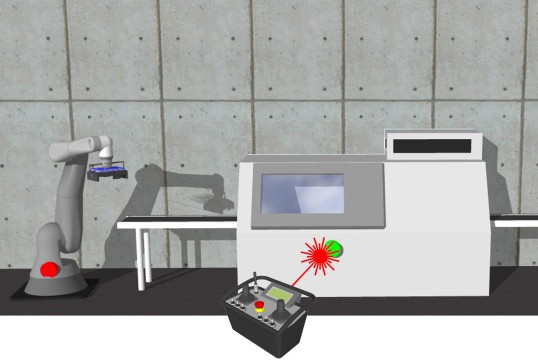
Ausrichtung des Bediengerätes zur Maschine ermöglicht Steuerung der Maschine - der Roboter hingegen ist im Stoppmodus.
Bild: IFA
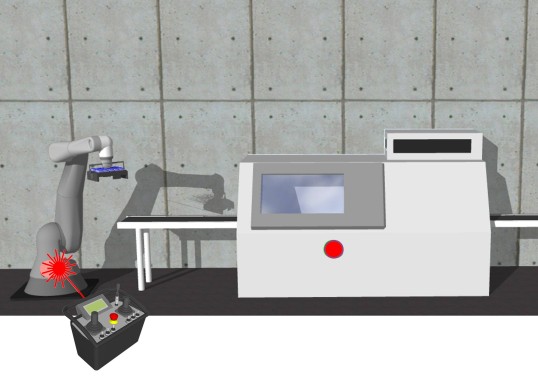
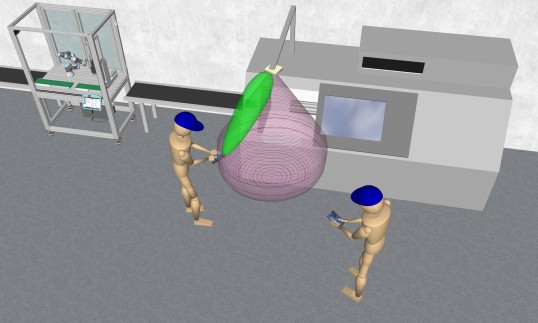
Ausrichtung der Steuerung zum Roboter ermöglicht Bedienung des Roboters - und die Maschine wird gestoppt.
Bild: IFA
Eine Bereichsüberwachung lässt sich auf verschiedene Arten realisieren.
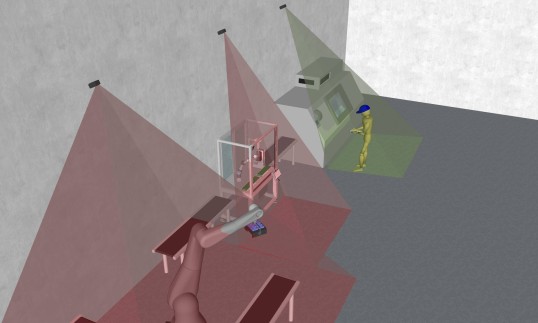
Bedienperson steht im Bedienbereich der hinteren Maschine, deren Bedienung freigegeben ist. Die anderen Maschinen befinden sich im Stoppmodus.
Bild: IFA
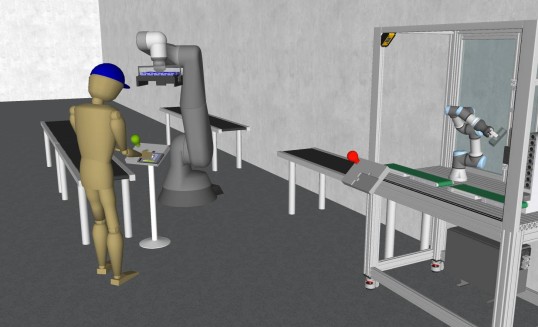
Eine Möglichkeit besteht darin, dass eine oder mehrere Kameras an der Maschine/Anlage den vorgesehenen Bedienbereich überwachen. Eine automatische Bildauswertung ermittelt, ob sich die Bedienperson mit dem Bediengerät im vorgesehenen Bereich befindet. Die Identifizierung des Bediengeräts erfolgt über Objekterkennung oder anhand von am Bediengerät angebrachten optischen Markern.
Nur wenn die Anwesenheit des Geräts im vorher definierten Bereich erkannt wird, ist die Steuerung der Anlage freigegeben.
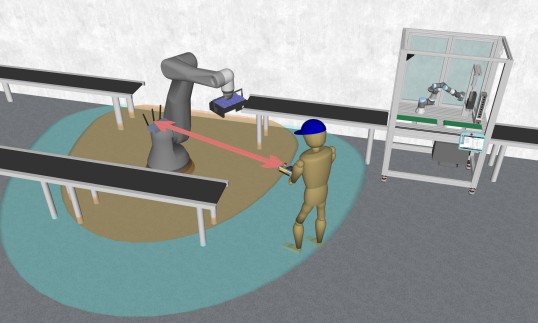
Kamera des Bediengerätes ist auf den Roboter gerichtet, dessen Bedienung damit freigeben ist.
Bild: IFA
Alternativ kann auch eine Kamera im mobilen Bediengerät die Umgebung erfassen. Erkennt das System die zur Bedienung ausgewählte Maschine (im Bild beispielsweise den Roboterarm), wird die Steuerung für diesen freigegeben.
Bewegungen mit dem Bediengerät wirken sich bei dieser Technik sehr schnell auf die Freigabe aus: Wird das Bediengerät so stark geschwenkt, dass die Maschine aus dem Sichtfeld verschwindet, stoppt die Bedienung sofort - obwohl die Bedienperson ihren Standort nicht verändert hat. Somit ist neben der Position auch die Orientierung des Bediengerätes entscheidend für eine Freigabe - das macht die Bedienung anspruchsvoller, erhöht aber die Sicherheit.
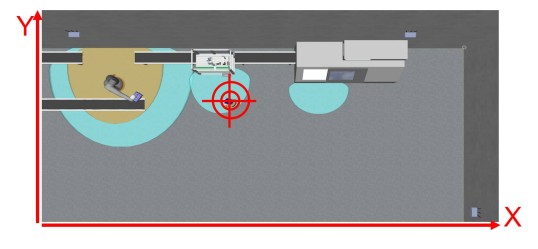
Das RFID-Feld (lila) ist so angelegt, dass sich die Bedienperson direkt vor der Maschine aufhalten muss.
Bild: IFA
Auch RFID-Systeme eignen sich zur Bereichsüberwachung. Bei dieser Technik zum automatischen und berührungslosen Identifizieren und Lokalisieren von Objekten senden Lesegeräte kontinuierlich Signale aus. Befindet sich ein RFID- Tag (Transponder) in Reichweite eines Lesegeräts, empfängt er die ausgesendeten Daten und sendet seinerseits Daten zurück an das Lesegerät. Das Lesegerät erkennt den Transponder im Erfassungsbereich und kann die Bedienung der Maschine freigeben.
Eine präzise Positions- oder Orientierungsbestimmung innerhalb des Erfassungsbereichs ist mit dieser Methode jedoch nicht möglich. Bei der Wahl des RFID-Geräts ist daher darauf zu achten, dass der Lesebereich nicht zu groß ist.
Zur Datenübertragung zwischen Bediengerät und Maschine kommen meist WLAN, Bluetooth oder UWB (Ultra-Wideband) zum Einsatz. Die Signallaufzeit dieser Verbindungen lässt sich nutzen, um den Abstand zwischen Sender und Empfänger zu ermitteln. Ist der Abstand in einem vorher festgelegten Intervall, kann die Maschinenbedienung freigegeben werden. Dieser Ansatz ermöglicht also eine einfache Form der Ortsbindung - mit relativ geringem Aufwand und ganz ohne zusätzliche Technik
Wichtig ist hierbei, dass das Empfangsmodul an der Maschine positioniert ist und die Verbindung zum Bediengerät nicht über ein Firmen-WLAN-Netzwerk (samt Router etc.) läuft - nur über eine Direktverbindung lässt sich der Abstand zwischen Bediengerät und Empfangsmodul ermitteln.
Abstandsmessung vom Empfangsmodul an der Roboterbasis zum Bediengerät der Bedienperson
Bild: IFA
Neben den Übertragungsarten WLAN, Bluetooth oder UWB lassen sich auch RFID oder Ultraschall für die Abstandsmessung einsetzen.
Die Echtzeitlokalisierung basiert auch auf einer Abstandsmessung zwischen Empfangsstation und Bediengerät. Bei diesem Ansatz wird der Abstand allerdings zwischen Bediengerät und mehreren (mindestens drei) festen Referenzpositionen gemessen. Aus diesen Abständen lässt sich die genaue Position des Bediengerätes im Raum ermitteln.
Diese Position wird dann mit den vorher festgelegten Bereichen verglichen. Befindet sich das Bediengerät in einer der festgelegten Zonen, wird die Maschinenbedienung freigegeben.
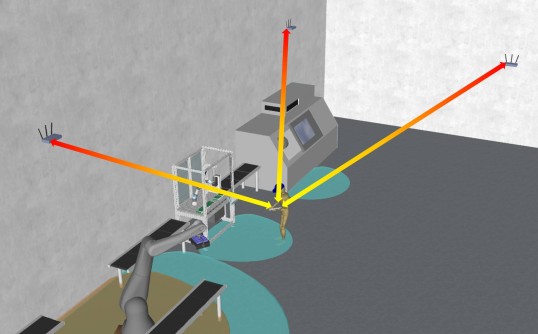
Abstandsmessung zu drei festinstallierten Empfangsmodulen
Bild: IFA
Berechnete Position im Raum mit vordefinierten Bedienbereichen
Bild: IFA
Für die Messung der Abstände lassen sich sowohl die Übertragungswege WLAN, Bluetooth und UWB als auch RFID oder Ultraschall einsetzen. Im Außenbereich kann darüber hinaus GPS (das Global Position System) zur Positionsbestimmung verwendet werden.
An Roboterstation eingelegtes Bediengerät.
Bild: IFA
Bei diesem Konzept bleibt das Bediengerät zwar mobil - die Bedienung ist jedoch nur von festen Standorten aus möglich. Diese Lösung ist beispielsweise dann sinnvoll, wenn verschiedene Maschinen oder Komponenten einer Anlage von festgelegten Positionen aus mit einem einzigen Gerät gesteuert werden sollen.
An jedem Bedienstand befindet sich eine Halterung für das Bediengerät. Wird das Bediengerät dort eingelegt, erkennt das System das und gibt die Steuerung für den zugeordneten Anlagenteil frei. Sobald das Bediengerät aus der Halterung entfernt wird, stoppt die angesteuerte Maschine automatisch.
Anmerkung:
Es gibt Anwendungen, in denen diese Art der Ortsbindung vorgeschrieben ist: Die Norm DIN EN 280-1 (2022-10) fordert für kabellose Steuerungen von Hubarbeitsbühnen eine mechanische Halterung. Nur wenn das Bediengerät korrekt eingelegt ist, darf die Steuerung der Hubarbeitsbühne freigegeben werden - siehe auch Rechtlicher Rahmen für die Ortsbindung mobiler Bediengeräte.
Unfallprävention: Digitalisierung - Technologien
Tel: +49 30 13001-3537