/webcode.jsp
/de/suche/index.jsp
https://publikationen.dguv.de/DguvWebcode?query=
Fahrerlose Flurförderzeuge benötigen für Notfälle und zur Instandhaltung manuell zu betätigende Steuereinrichtungen. Neben im Flurförderzeug eingebauten Steuereinrichtungen können auch kabelgebundene oder kabellose Steuereinrichtungen verwendet werden.
Die DIN EN ISO 3691-1 "Sicherheit von Flurförderzeugen. Sicherheitsanforderungen und Verifizierung. Teil 1: Motorkraftbetriebene Flurförderzeuge mit Ausnahme von fahrerlosen Flurförderzeugen, Staplern mit veränderlicher Reichweite und Lastentransportfahrzeugen" enthält Anforderungen an kabelgebundene und kabellose manuelle Steuereinrichtungen für Flurförderzeuge mit Fahrer.
In einer Diskussionsrunde zwischen Herstellern von fahrerlosen Flurförderzeugen, Herstellern von Schutzeinrichtungen, Mitarbeitern des Instituts für Arbeitsschutz der Deutschen Gesetzlichen Unfallversicherung (DGUV) sowie den zuständigen Mitarbeitern im Fachbereich "Handel und Logistik", Sachgebiet "Fördern, Lagern, Logistik im Warenumschlag" der DGUV im März 2014 wurden folgende, manuell gesteuerten Betriebsarten fahrerloser Flurförderzeuge diskutiert.
Unter Berücksichtigung und Diskussion der Forderungen aus der DIN EN ISO 3691-1 wurde die Verwendung von Smartphones oder Tablet-PC´s (im Folgenden nur noch Tablets genannt) zur manuellen Steuerung (für Notfälle und zur Instandhaltung) fahrerloser Flurförderzeuge unter folgenden Bedingungen als akzeptabel erachtet.
Maßnahmen wie bei Ziffer 2
Maßnahmen wie bei Ziffer 3, jedoch mit geringeren Werten (Geschwindigkeit, Weg)
Diese Betriebsart ist nicht vorgesehen bzw. sicherheitstechnisch nicht zu bewältigen. Sie muss daher technisch verhindert werden.
Hierbei handelt es sich um ein "normales" Flurförderzeug, es gelten die Anforderungen in DIN EN ISO 3691-1, 4.4.2.6 a) und c).
Aktuelle Informationen und Regelwerke, die allgemeine Anforderungen enthalten
Schmalgänge im Sinne der DGUV Vorschrift 68 "Flurförderzeuge" sind Verkehrswege für Flurförderzeuge in Regalanlagen ohne beidseitigem Sicherheitsabstand von jeweils mindestens 0,50 m zwischen den am weitesten ausladenden Teilen der Flurförderzeuge einschließlich ihrer Last und festen Teilen der Umgebung.
Die DIN EN ISO 3691-4 "Flurförderzeuge - Sicherheitstechnische Anforderungen und Verifizierung – Teil 4: Fahrerlose Flurförderzeuge und ihre Systeme" enthält Beschaffenheitsanforderungen für fahrerlose Flurförderzeuge. Danach muss u.a. ein fahrerloses Flurförderzeug mit berührungslos wirkenden Personenerkennungssystemen nach Erkennen eines in der Norm aufgeführten stehenden Prüfkörpers zum Stillstand kommen bevor feste Teile des Flurförderzeugs auf den Prüfkörper auftreffen.
In Tabellen in Anhang A der Norm sind erforderliche Sicherheitsmaßnahmen, zulässige Fahrgeschwindigkeiten und Bereichsbezeichnungen in Abhängigkeit von seitlichen und frontalen Sicherheitsabständen bei den Fahrzeugen aufgeführt. Zeile 5c in Tabelle A.2 beschreibt den Einsatz der Geräte in Schmalgängen. Diese Beschreibung enthält z. B. die Vorgaben, dass
In Anhang A.2.3.1 dieser Norm wird der eingeschränkte Bereich wie folgt beschrieben:
"Ein Bereich mit unzureichendem Freiraum, der nicht durch Personenerkennungseinrichtungen entsprechend 4.8.2.1 (der Norm) geschützt werden kann, muss als „eingeschränkter Bereich" bezeichnet und entsprechend gekennzeichnet sein.
BEISPIEL Beispiele für eingeschränkte Bereiche können Blocklager oder Schmalgänge (en: very narrow aisle (VNA)) sein.
Dabei wird davon ausgegangen, dass durch die Sensoren am fahrerlosen Flurförderzeug kein ausreichender Personenschutz im Schmalgang gegeben ist.
Die DIN 15185-2:2013-10 "Flurförderzeuge – Sicherheitsanforderungen – Teil 2: Einsatz in Schmalgängen" enthält in Deutschland Beschaffenheitsanforderungen für Schutzsysteme und Betriebsbestimmungen beim Einsatz von Flurförderzeugen in Schmalgängen. Im Vorwort wird aufgeführt, dass die dort enthaltenen Anforderungen zusätzlich zu den Anforderungen der beiden Basisnormen für personengesteuerte Flurförderzeuge gilt. Dies sind die DIN EN ISO 3691-1 "Flurförderzeuge - Sicherheitstechnische Anforderungen und Verifizierung – Teil 1: Motorkraftbetriebene Flurförderzeuge mit Ausnahme von fahrerlosen Flurförderzeugen, Staplern mit veränderlicher Reichweite und Lastentransportfahrzeugen" und DIN EN ISO 3691-3 "Flurförderzeuge - Sicherheitstechnische Anforderungen und Verifizierung – Teil 3: Zusätzliche Anforderungen für Flurförderzeuge mit hebbarem Fahrerplatz und Flurförderzeuge, die zum Fahren mit angehobener Last ausgelegt sind".
Bei der Erarbeitung der DIN 15185-2 wurde kein Bezug für fahrerlose Flurförderzeuge auf die DIN EN ISO 3691-4 gemacht, da damals nur ein unzureichender, seit Jahren nicht weiter bearbeiteter Entwurf dieser Norm (als reine ISO-Norm) vorlag. Die Anforderungen der DIN 15185-2 können aber bei der Durchführung einer Risiko- bzw. Gefährdungsbeurteilung für fahrerlose Flurförderzeuge als hilfreiche Hinweise, die den Stand der Sicherheitstechnik beim Einsatz personengesteuerter Flurförderzeuge darstellen, herangezogen werden.
Die DIN 15185-2 enthält in Abschnitt 4.3 u.a. Anforderungen an die Dimensionierung der Schutzfelder von am Flurförderzeug angebrachten Personenschutzsystemen und an welchen Positionen im Schmalgang ein bestimmter Prüfkörper erkannt werden muss (*). Für von Personen gesteuerten Flurförderzeugen ist dann ein ausreichender Personenschutz gegeben, wenn außerdem auch die anderen Bedingungen dieser Norm eingehalten sind. Wenn die am fahrerlosen Flurförderzeug angebrachten Sensoren die o.g. Anforderungen erfüllen, kann bei vergleichbaren Betriebszuständen ebenfalls ein ausreichender Personenschutz angenommen werden.
Beim Einsatz fahrerloser Flurförderzeuge in Schmalgängen sind verschiedene Betriebsarten denkbar, die unterschiedliche Sicherheitsmaßnahmen erforderlich machen.
1. In den Schmalgängen, in denen fahrerlose Flurförderzeuge fahren, befinden sich systembedingt keine Fußgänger (d.h. es erfolgt in diesen Gängen nie eine Kommissionierung durch Fußgänger)
2. In den Schmalgängen, in denen fahrerlose Flurförderzeuge fahren, befinden sich systembedingt Fußgänger (d.h. es erfolgt auch eine Kommissionierung durch Fußgänger)
Grundsätzlich hat der Arbeitgeber dafür zu sorgen, dass die Verwendung der FTF über die gesamte Verwendungsdauer nach dem Stand der Technik sicher ist. Zunächst sollte geprüft werden, ob der aktuelle Fahrzeugbestand nach dem aktuellen Stand der Technik sicher betrieben werden kann. Ist dies nicht der Fall, ist die bestehende Fahrzeugflotte komplett zu ersetzen oder entsprechend anzupassen.
Bei der Integration von Neufahrzeugen ist zu prüfen, ob ein sicherer Betrieb der Kombination aus Neu- und Bestandsfahrzeugen möglich ist. Hierzu sollte das Verhalten der neuen Fahrzeuge dem der Bestandsfahrzeuge entsprechen. Dabei sind unter anderem folgende Aspekte zu berücksichtigen:
Unabhängig vom gewählten Vorgehen gilt: Das Betriebspersonal muss stets über alle relevanten Änderungen unterwiesen werden.
Die Funktionsfähigkeit der am Fahrzeug vorhandenen Not-Halt-Einrichtungen darf im Rahmen der bestimmungsgemäßen Verwendung grundsätzlich nicht eingeschränkt werden. In Ausnahmefällen kann es jedoch vorkommen, dass durch den Einsatz von Transportgestellen eine oder mehrere Not-Halt-Einrichtungen nicht mehr zugänglich sind.
In diesen Fällen sind zusätzliche Not-Halt-Einrichtungen anzubringen, entweder am Transportgestell selbst oder stationär entlang des Fahrwegs, sofern dies zur Erfüllung der Anforderungen gemäß DIN EN ISO 3691-4:2023-12, Abschnitt 4.8.1 erforderlich ist.
Dort wird gefordert, dass Not-Halt-Einrichtungen von allen Seiten des Fahrzeugs gut sichtbar, zugänglich und in einem Abstand von maximal 1200 mm angebracht sein müssen. Ist das durch Transportgestelle nicht mehr gewährleistet, muss nachgebessert werden.
Die DIN EN ISO 3691-4:2023-12 „Flurförderzeuge – Sicherheitsanforderungen und Verifizierung – Teil 4: Fahrerlose Flurförderzeuge und ihre Systeme“ enthält keine Einschränkung auf Innenbereiche. Daher gelten die Anforderungen der Norm unabhängig davon, ob das fahrerlose Transportfahrzeug (FTF) innerhalb von Gebäuden oder im Außenbereich betrieben wird.
Allerdings sind die Anforderungen der Norm im Außenbereich durch Einflussgrößen wie zum Beispiel Witterung, wechselnde Reibwert oder wechselnde Lichtverhältnisse wesentlich schwieriger umzusetzen. Es sind daher ggf. zusätzliche Sicherheitsmaßnahmen erforderlich. Hierzu zählen unter anderem die Anpassung der Sensorik, eine erweiterte Umfeldüberwachung. Diese Maßnahmen müssen im Rahmen der Risikobeurteilung berücksichtigt und umgesetzt werden, um den besonderen Umgebungsbedingungen im Außenbereich gerecht zu werden. (siehe auch FB Aktuell FBHM 119)
Wird Transportgut von einem FTF an ein Montagepodest übergeben, ist in der Regel kein ausreichender Freiraum für Fußgänger von mindestens 0,5 m Breite vorhanden. In solchen Fällen muss sichergestellt werden, dass der Bereich vor dem Podest frei von Personen ist.
Die Personenerkennungseinrichtung des FTF muss so lange wie möglich aktiv bleiben. Der Abstand zwischen der Kante des aktiven Schutzfeldes und benachbarten Objekten (z. B. andere FTF) sollte 180 mm oder weniger betragen, bevor die Personenschutzeinrichtung stummgeschaltet wird (Muting).
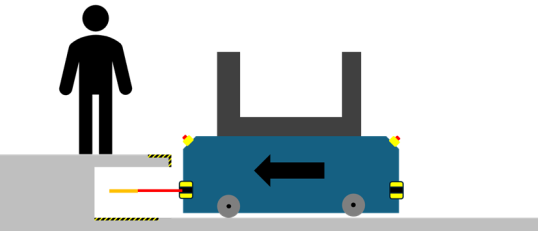
Der Übergabebereich vor dem Podest ist als Betriebsgefahrenbereich einzustufen, da es zu einer Unterschreitung sicherheitsrelevanter Mindestabstände kommt. Entsprechend ist eine sichtbare Kennzeichnung dieses Bereichs erforderlich (Abbildung 1). Alternativ kann unter dem Podest eine Aussparung vorgesehen werden. Dadurch kann das FTF mit aktivem Schutzfeld bis an das Montagepodest heranfahren. Eine Geschwindigkeitsreduzierung ist aber auch in diesem Fall erforderlich, da im oberen Bereich des FTF eine nicht gesicherte Quetschkante verbleibt. (Abbildung 2).
Zusätzlich ist zu prüfen, ob die am FTF vorhandenen Not-Halt-Einrichtungen vom Gefahrenbereich aus gut erreichbar sind. Ist dies nicht der Fall, müssen ergänzende Sicherheitsmaßnahmen getroffen werden – z. B. durch zusätzliche, stationär angebrachte Not-Halt-Einrichtungen.
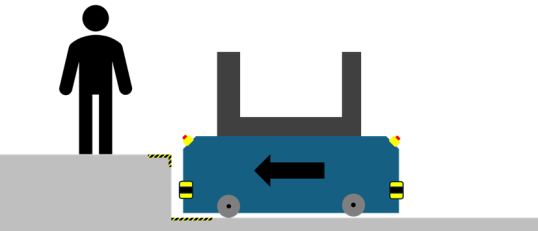
Abbildung 1: Montagepodest mit Betriebsgefahrbereich; Scanner stummgeschaltet; Abstand Podest < 180 mm
Sofern sich ein Hersteller bezüglich der Anforderungen an die Personenerkennung auf die Vermutungswirkung der DIN EN ISO 3691-4 beruft, darf ein FTF nicht ohne Personenerkennungseinrichtung in Verkehr gebracht werden, auch nicht bei einer reduzierten Fahrgeschwindigkeit von 0,3 m/s. Nach der DIN EN ISO 3691-4:2023-12, Abschnitt 4.8.2.1 müssen FTF mit Personenerkennungseinrichtungen für alle Fahrtrichtungen ausgestattet sein.
Gemäß DIN EN ISO 3691-4:2023-12, Abschnitt 4.8.2.3, ist ein Stummschalten der Personenerkennungseinrichtung nur in bestimmten Situationen, z. B. der Lastübergabe zulässig, wenn die Fahrgeschwindigkeit auf maximal 0,3 m/s reduziert wird.
In diesen Situationen sind zudem zusätzliche Schutzmaßnahmen zu ergreifen, um den Schutz von Personen sicherzustellen, beispielsweise durch begrenzten Arbeitsraum oder technische Zusatzvorkehrungen. Weiterhin ist eine Stummschaltung der Personenerkennungseinrichtung bei einer Reduktion der Höchstgeschwindigkeit auf 0,3 m/s ohne Ersatzmaßnahmen nicht zulässig.
Eine dauerhaft fehlende Personenschutzeinrichtung ist nach den Vorgaben der DIN EN ISO 3691-4:2023-12 nicht vorgesehen. Dies gilt für alle Betriebsbereiche ausgenommen dem geschlossenen Bereich. Hersteller sind verpflichtet, geeignete Personenerkennungseinrichtungen vorzusehen, sofern das Fahrzeug in Bereichen eingesetzt wird, in denen Personen anwesend sein können.
Ja, die wiederkehrende Prüfung darf grundsätzlich vom Unternehmen selbst durchgeführt werden, sofern die Prüfung durch eine zur Prüfung befähigte Person im Sinne der Technischen Regel für Betriebssicherheit (TRBS) 1203 „Zur Prüfung befähigte Person“ erfolgt.
Die zur Prüfung befähigte Person muss über die erforderlichen Fachkenntnisse und Berufserfahrung verfügen und in der Lage sein, den arbeitssicheren Zustand des FTF zu beurteilen. Neben den Anforderungen gemäß §§ 37–39 der DGUV Vorschrift 68 “Flurförderzeuge“ können dabei auch die Anforderungen aus Anhang 2 der TRBS 1203 zu berücksichtigen.
Je nach Ausführung und Funktion des FTF sind insbesondere folgende Teile des Anhangs relevant:
Gemäß Maschinenrichtlinie sind Hersteller dazu verpflichtet, dem Betreiber in der Betriebsanleitung Informationen über auszuführende Wartungsarbeiten und regelmäßige Prüfungen bereitzustellen.
Bei der Festlegung der Prüffristen sind neben den in der TRBS 1201 enthaltenen Empfehlungen und DGUV Vorschrift 68 genanntem Intervall von längstens einem Jahr, ebenfalls die vom Hersteller des betreffenden Geräts gemachten Vorgaben zu berücksichtigen.
Die ordnungsgemäße Durchführung der Prüfung auf Basis von Herstellervorgaben muss dokumentiert werden. Hierbei sind auch die schädigenden Einflüsse durch die betrieblichen Bedingungen, wie z. B. Staub, Temperatur, Feuchtigkeit, Einsatzdauer zu berücksichtigen.
Beim Einsatz von FTF an Doppelregalen besteht die Gefahr, dass beim Ein- oder Auslagern von Ladeeinheiten auf einer Seite unbeabsichtigt Einheiten auf der gegenüberliegenden Regalseite herabgestoßen oder verschoben werden. Dies kann zu Sachschäden oder Gefährdungen für Personen führen.
Um dies zu vermeiden, sind geeignete technische oder organisatorische Maßnahmen zu treffen. Dazu gehören zum Beispiel:
Solche Maßnahmen sind im Rahmen der Risikobeurteilung und Gefährdungsbeurteilung zu ermitteln und umzusetzen, um die Sicherheit beim Betrieb des Lagersystems zu gewährleisten.
Weitere Information für Integratoren sind der Fachbereich AKTUELL"Schutzmaßnahmen gegen Gefährdungen durch herabstürzende Gegenstände bei Doppelregalen" zu entnehmen.
Nein, ein übergreifender Not-Halt ist nicht grundsätzlich erforderlich.
Ein übergreifender Not-Halt kann nach DIN EN ISO 13850, Abschnitt 4.1.2.1 notwendig werden, wenn:
1. Gefährdungen im Übergabebereich auftreten, z. B. Quetsch- oder Scherstellen, die nicht in einer Risikobeurteilung erfasst wurden. In diesem Fall muss der Betreiber dies im Rahmen seiner Gefährdungsbeurteilung erkennen und ggf. Maßnahmen nach dem TOP-Prinzip (Technisch – Organisatorisch – Persönlich) umsetzen.
2. Die Auslösung eines Not-Halts in einem Wirkbereich dazu führt, dass in einem benachbarten Bereich (z. B. durch Produktionsverkettung) weitere Gefährdungen entstehen können. Dann ist es erforderlich, die Wirkbereiche funktional zu koppeln und ggf. einen übergreifenden Not-Halt vorzusehen.
3. Die Trennung der Gefährdungsbereiche technisch nicht möglich oder nicht zuverlässig umzusetzen ist.
Arbeitsstätten müssen den Anforderungen der Arbeitsstättenverordnung entsprechen. Zur Auslegung von Fluchtwegen kann auf die Technische Regel für Arbeitsstätten ASR A2.3 "Fluchtwege und Notausgänge" zurückgegriffen werden. Danach sind die Fluchtwegbreiten bei allen auftretenden Betriebsszenarien gemäß den Vorgaben nach Abschnitt 4 Ziffer 3 ASR A2.3 zu gewährleisten.
In Notfällen dürfen:
Die DIN EN ISO 3691-4:2023 ist grundsätzlich auch für den Einsatz von FTF als mobile Montageplattformen anwendbar. Allerdings sind nicht alle Risiken, die bei einem solchen Einsatz entstehen von der Norm abgedeckt. Daher sind diese zusätzlichen Risiken im Rahmen der Risikobeurteilung zu berücksichtigen und durch wirksame Maßnahmen (z. B. Fingerschutz, Fußschutz, reduzierte Geschwindigkeit) zu reduzieren.
Bei FTF, die bestimmungsgemäß vom Hersteller für den Einsatz als mobile Montageplattformen vorgesehen sind, kann der Betreiber davon ausgehen, dass die zusätzlichen Risiken berücksichtigt wurden.
Bei direkten Montagetätigkeiten an Produkten auf FTF kann zwischen dem Takt- und dem Fließbetrieb unterschieden werden. Im Taktbetrieb wird nur an dem stehenden FTF gearbeitet, im Fließbetrieb finden Montagevorgänge auch am fahrenden FTF statt.
In Abhängigkeit der Betriebsart können unter anderem folgende Maßnahmen geeignet sein, die Risiken zu reduzieren:
- Absicherung in Fahrtrichtung vorzugsweise durch berührungslos wirkende Schutzeinrichtung
- Warnsignal vor dem Anfahren
- Abstand der Verkleidung des FTF max. 30 mm zum Boden
- Abgerundete Rahmenstruktur am FTF; keine scharfen Ecken oder Kanten
- Not-Halt-Einrichtungen müssen von den Arbeitsplätzen erreichbar sein, ansonsten sind sie an geeigneten Stellen zu ergänzen
Ergänzende Anforderungen im Fließbetrieb:
- Seitliche Absicherung des FTF mit Personenerkennungseinrichtungen
- Reduzierte Geschwindigkeit (z. B. < 0,1 m/s)
- ausreichend Freiraum (z. B. min. 0,5 m) am Fahrweg des FTF zu feststehenden Einrichtungen (z. B. Regale; Terminals, Werkzeughalterungen)