/webcode.jsp
/en/search/index.jsp

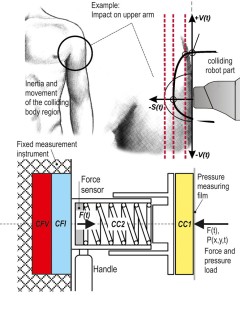
Prototype of the force/pressure instrument in the application, Figure 2
Source: MRK-Systeme GmbH
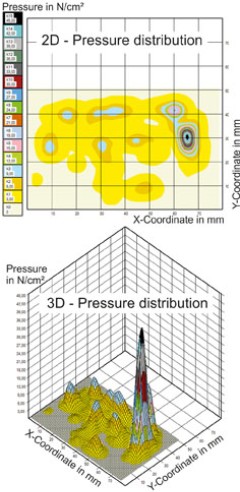
Partial pressure distribution in a collision plane, Figure 4, Source: IFA
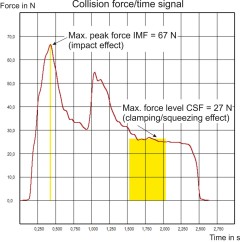
Under certain conditions, collisions may occur between human beings and collaborative robots at workplaces where the latter are used. In the course of the (required) risk assessment, the stress arising in critical collisions must be determined by means of an instrument that resembles the human body in its mechanical characteristics. Testing of an accepted level of strain against the existing standards documents entails the measurement, analysis and evaluation of the maximum collision force and of the local maximum pressure occurring in the collision plane. These two strain criteria must be determined and reviewed for both dynamic and quasi-static collision effects.
In order for the criteria associated with collision stress to be recorded and evaluated, the IFA has developed the KDMG-KOLROBOT force-pressure measurement system. This instrument is suitable for use in industrial risk assessments. Figure 1 shows it as a schematic diagram and its essential measurement properties. Figure 2 shows an application scenario.
The instrument employs a two-stage compression arrangement which simulates the deformability of relevant parts of the body which may be affected. The deformability of the body is considered with reference to the relevant standards documents by deformable plastic plates and springs for all individual regions of the body model. For a collision event, the rigidity of the affected body part is thus simulated by the instrument, and the external total force and the pressure distribution in the collision plane are measured. The force is measured by means of an integral sensor (see Figure 3). A range of sensor systems can be used for measurement of the pressure distribution (see Figure 4). The measurement and analysis system is fully controlled from a PC by means of specially developed software.
For the purpose of collision measurement, the instrument is fixed to a rigid stop. Since in a real collision, the inertial behaviour of the human body may have a damping effect, the measurement signals can be adjusted to take account of the body point under strain and the body posture. The adjustment functions required for this purpose are determined by studies performed on groups of test subjects. The measurement signals are also adjusted in consideration of the collision velocity.
The KDMG-KOLROBOT measurement and analysis instrument takes account of the relevant mechanical properties of different regions of the body by virtue of its design and the underlying principle of measurement and analysis. By way of this biofidelity and the specification parameters of the measurement systems and analysis methods, it constitutes a standard measurement method with high precision, reproducibility and usability. The instrument thus satisfies the requirements in the standards for a suitable test method, and can be used for testing of the medical/biomechanical requirements.
By suitable design of the robot system/workplace or assignment of suitable robot control parameters, the instrument can be used to reduce the stress upon the body such that it lies below the severity of strain defined by the risk assessment.
The KDMG-KOLROBOT force-pressure measurement system is sold under licence by GTE Industrieelektronik GmbH, Helmholtzstrasse 21, 38-40, 41747 Viersen, Germany. All developments of the test criteria or the biofidelity of the test method to be expected in the coming years can be incorporated into the design of the instrument.

The new standard ISO/PAS 5672 was published at the end of 2023: Robotics - Collaborative applications - Test methods for measuring forces and pressures in human-robot contacts


Accident Prevention: Digitalisation - Technologies
Tel: +49 30 13001-3510