Bild vergrößern
Prototyp einer Ultraschallabsicherung am Roboterarm
Bild: IFA
Ein wesentlicher Baustein an einem Arbeitsplatz mit kollaborierenden Robotern sind sogenannte sichere Steuerungen. Sie können alle Bewegungen der Roboter gezielt überwachen und führen bei zu hoher Geschwindigkeit oder einer unerlaubten Position des Roboters zum sofortigen Stillsetzen. Voraussetzung ist, dass die Robotersteuerung über sichere Sensoren – beispielsweise Kameras oder taktile Sensoren – erkennt, wo der Mensch sich bewegt. Dann kommt der Roboter ihm nicht zu nahe oder weicht ihm aus. So können Arbeitsplätze geschaffen werden, an denen Roboter den Menschen assistieren. Trotz dieser technischen Schutzmaßnahmen bleibt ein geringes restliches Kollisionsrisiko bestehen.

Bild vergrößern
Prototyp einer Ultraschallabsicherung am Roboterarm
Bild: IFA
Im IFA werden geeignete neue Technologien für Schutzmaßnahmen an kollaborierenden Robotern erprobt und bewertet, beispielsweise im Rahmen von Forschungsprojekten und studentischen Abschlussarbeiten:
-
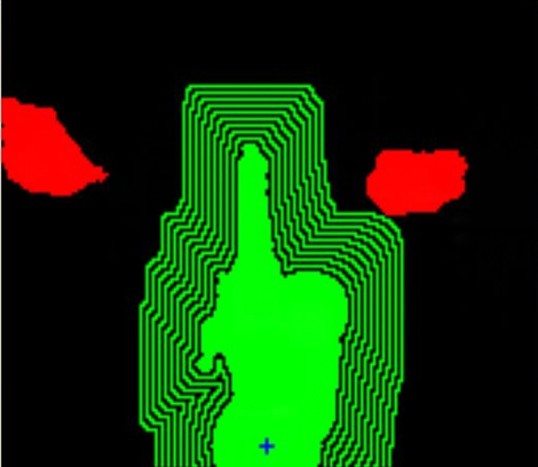
Eine erste Umsetzung eines dynamischen Schutzfeldes für Roboter wurde mithilfe einer nicht sicheren 3D-Kamera vom
Typ Photonic Mixer Device (PMD) erreicht. Sie ermittelt für jedes Kamerapixel die Distanz zwischen Kamera und
wahrgenommenen Objekten bis zu einer Entfernung von 7,5 m. Dabei können mehrere Personen detektiert und verfolgt
(getrackt) werden.
-
Ein weiteres Projekt untersuchte eine Lösung mittels Ultraschallsensoren, die sich bereits in der
Sicherheitstechnik bewährt haben. Ihr Vorteil ist, dass sie auf jegliche Annäherung im Erfassungsbereich reagieren und
als Messergebnis immer die kürzeste Distanz zum erkannten Objekt zurückliefern. Der Rechenaufwand pro Sensor ist klein,
sodass eine größere Anzahl von Sensoren eingesetzt werden kann, um eine flächendeckende Messung zu gewährleisten.
-
Im Projekt EsIMiP, gefördert von der Bayerischen Forschungsförderung (AZ 852 08), wurde ein Konzept
entwickelt, um den Roboter mit nach außen gerichteten Ultraschallsensoren einzukleiden. Das Konzept ähnelt der
Einparkhilfe von Kraftfahrzeugen, bei der wenige Ultraschallsensoren in die Stoßstange eingebaut sind. Die Anzahl der
am Roboter verwendeten Sensoren ist jedoch größer. Die Videos zum Projekt EsIMiP finden Sie auf den Seiten der TU München (). Ein Projektteil des IFA wird in Video Teil 3
dargestellt.
-
Ein 3D-Kamerasystem erlaubt die Erfassung des gesamten Arbeitsraumes und kann somit für die Planung von
Ausweichbewegungen genutzt werden. Gleichzeitig können diese Bewegungen durch die Ultraschallsensoren auf gefährliche
Annäherung überwacht werden. Die Ultraschallsensoren stellen eine Annäherung fest und nachgelagerte Algorithmen
reduzieren die Geschwindigkeit des Roboters. Dadurch können bei der Kameratechnik und der Pfadplanung nicht
sicherheitstechnisch ertüchtigte, experimentelle Algorithmen eingesetzt werden, wobei der Mensch aber durch das
Sicherheitssystem aus Ultraschallsensoren abgesichert wird.
Neben den genannten Forschungsthemen führt das IFA Untersuchungen sowie Prüfungen/Zertifizierungen zur Sicherheit von Kamerasystemen durch und arbeitet in der aktuellen Normensetzung (IEC 61496-4) mit.
 - Technische Schutzmaßnahmen")
 - Technische Schutzmaßnahmen")